{kind=link}
 The second challenge
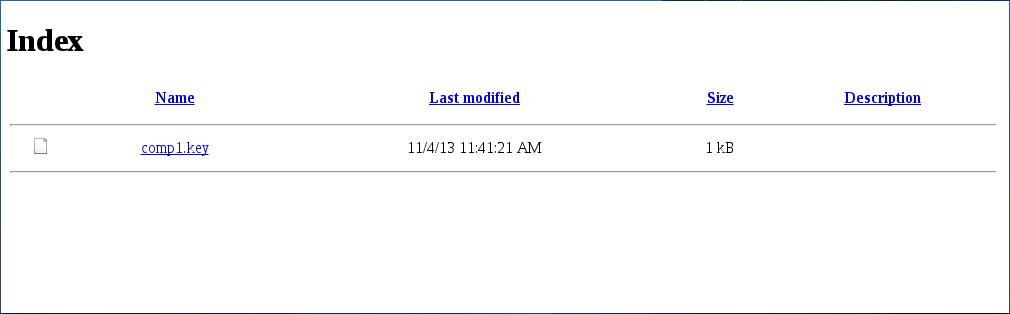
The second challengeThis is what you get for challenge 2 - a directory listing containing a single file. The file is an RSA private key (I guess not that private any more):
-----BEGIN RSA PRIVATE KEY-----
MIIC2gIBAAKBgDfABK8+joDLdbFTDJ+y3PTTzkqCi1L2qEjgxdg1iyZshJTeKUck
SYVyKBeOBtB3FwwqXVa6iNEHJeLFewFE6ulEOIcatVp11Zg0ibMfnqTivbd6t8/z
3KzqrFksg9xQiicMactmTqFkm8ro5ODc2NTQzMjEwLy4tLCslBOCOVHxAgMBAAEC
gYATW12FB2BtQbecmSxh6rWjYENZRZhgdvoZS8oF9xlYfwdNtRF5/RR1/BwFia++
BAuBktgTu/KzORsjcNPzrd0uTCbTG6hW8YPK2ROVOOeAMHek8Nl3+SW5wdePKuWw
MdjDDjqxXDns+ZC1d2Cpz5V+x+2znOYL0bsEKei0sWl7LQKBgDfABK8+joDLdbFT
DJ+y3PTTzkqCi1L2qEjgxdg1iyZshJTeKUckSYVyKBeOBtB3FwwqXVa6iNEHJeLF
ewFE6uhVSior5HGPArFhsOQ0v9ob1NCV7P8M99qN4XplmX/xs05HgQCVh9aMWtio
pKCcmJSQjIiEgHx4dHBsU9JB+TvkAkB3dy53aHRzaXNpbGd1b2VjdHNyZWhzcmku
ZW9jdS4va2xidGVoY2VsIHkgICAgICAgICAgICAgICAgICAgIAuPAkATpSSd/C5S
IEAbUPk+ZYAdt7OYVzay7ViAiaukhkt+/sJG+m8GmHnAKyLf9ohx3/aIcd/2iHHf
9ohx3/ayirJPAkAIefJYEpdAoRjJQCHPGUpOVjLiyQMyPcnsutG+ctAGGU8lZTDU
yUim9V7iwqTE4sKkxOLCpMTiwqTE4sKkxOFNAoGAFInzTsAOkauW3crd1XfxMhxi
tUkapdQqlwvFhZuouNIybfEOfW6WkjtghBDyqf50cEFWXMJ7Vk8mr6cwTosPvYKU
VXKUCblretLTeU95TlbkprizPky++5b7pQuSi3mpLMi+6VgvcjTthfXPYNg2JjJp
gmteC4felYL/2FTAmT8=
-----END RSA PRIVATE KEY-----
Naively I tried
rsa.metro.co.uk but of course it wouldn't be that
easy!
RSA Encryption(top)I can't pretend to be even knowledgable about encryption, let alone an expert. Everything I know about RSA I learnt trying to crack these codes. Basically it relies on the fact that factorising very big numbers is rather slow to do on current computers.
The first thing I tried was to decrypt the ciphertext from challenge
1 using this key:
$ openssl rsautl -decrypt -in cipher1 -out plaintext -inkey comp1.key
RSA operation error
139938077894464:error:0406506C:rsa routines:RSA_EAY_PRIVATE_DECRYPT:data greater than mod len:rsa_eay.c:584:
This made absolutely no sense to me, so I did some research. I also
tried generating a public key from the private key, but that didn't
work either. Can you tell I have no idea what I'm doing?
It turns out that data encrypted by RSA ends up as a chunk of data of
a specfic length - and the length must be no greater than the length
of the "modulo" parameter of the RSA key. I encrypted some random
strings to see what happened:
$ openssl rsautl -encrypt -inkey comp1.key > encrypted.txt
hello[^D]
$ wc -c encrypted.txt
128 encrypted.txt
The wc command gives you a word count,
though in this case I've asked it to tell me how many bytes are in
the encrypted file - 128. This means that our encrypted data should
be 128 bytes long. Remember this for later!
I noticed something fishy when I tried to decrypt the test files I had encrypted - openssl was throwing a wobbly. A little googling indicated that maybe the key was bad so I decided the RSA was a red herring and started looking at the key file itself.
A Solution (Base64)(top)The key file is encoded as Base64 - a way to encode binary data as a printable string, so that you can stick it in an email or something similar. This is standard for RSA keys, but the "=" sign at the end is a dead giveaway.
There's a linux tool for decoding base64, handily called
base64. If you strip the header and footer off the
RSA key and pass it to base64 to decode, you get
a bunch of binary garbage (which kills your terminal, btw),
but you'll also spot some human readable (ish)
text at the end. I ran the output through hexdump
and grepped out
readable things. Here's some commands to do it:
$ sed '1d' comp1.key | sed '$d' > tmp.b64
$ base64 -d tmp.b64 > tmp.out
$ hexdump -C tmp.out | grep -B3 -A3 --color=always --binary-file=text -E "([a-z]){3}"
Which gives some output which looks a little like this:
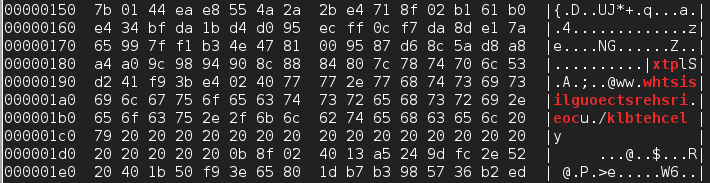 Almost readable output
Almost readable outputThe bit that should catch your eye here is (mostly) in red. Notice "ww.w" at the start? Kinda looks like a web address. If we correct for Endianness we get a lovely little URL: www.thisisgloucestershire.co.uk/bletchley. Yet again, a Turing vibe.
So there we have it, second challenge solved, second answer found (bletchley) and third clue located. On to Challenge 3!